DRV8301 是德州仪器 (TI) 推出的一款高性能栅极驱动芯片,专为三相无刷直流电机 (BLDC) 和永磁同步电机 (PMSM) 驱动设计。
该器件提供三个半桥驱动器,每个都能驱动两个 N 沟道 MOSFET。DRV8301支持高达 1.7A 的源极电流和 2.3A 的峰值电流能力。DRV8301 可以在 6V~60V 的宽范围内使用单个电源供电。该器件使用自举栅极驱动器架构和涓流充电电路,以支持 100% 的占空比。DRV8301 在高侧或低侧 MOSFET 切换时使用自动握手功能,以防止电流流动。高侧和低侧 MOSFET 的集成 VDS 感应用于保护外部功率级免受过流条件的影响。
DRV8301包括两个电流并联放大器,用于精确测量电流。这些放大器支持双向电流传感,并提供可调节的输出偏移,最高可达 3V。
DRV8301 还包含一个集成的开关模式降压转换器,具有可调输出和开关频率。降压转换器可以提供高达 1.5A 的电流,以支持 MCU 或额外的系统电源需求。
这款芯片用不好很容易烧掉
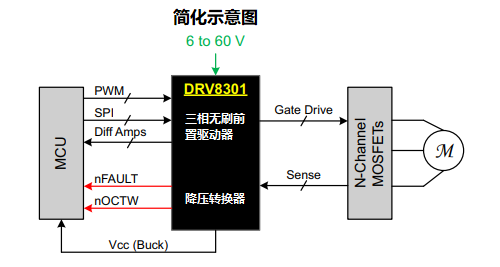
差分放大器(Diff Amps)
电器属性
工作电源电压范围:6V 至 60V
栅极驱动电流能力:1.7A 源极电流和 2.3A 漏极栅极驱动电流能力
支持斜率控制以减少 EMI
自举栅极驱动器,支持 100% 占空比
支持 6- 或 3-PWM 输入模式
集成双电流分流放大器,具有可调增益和偏移
集成 1.5A 降压转换器
支持 3.3V 和 5V 接口
支持 SPI
保护功能:
- 可编程死区时间控制 (DTC)
- 可编程过流保护 (OCP)
- PVDD 和 GVDD 欠压锁定 (UVLO)
- GVDD 过压锁定 (OVLO)
- 过温警告/关断 (OTW/OTS)
- 通过 nFAULT、nOCTW 和 SPI 寄存器报告状态
DRV8301 支持两种不同的控制模式,分别是 6 路 PWM 模式和 3 路 PWM 模式,而不是指它输出 6 个 或3 个 PWM 信号。实际上 DRV8301 本身并不会生成 PWM 信号,它仅用来接收 MCU 的 PWM 信号,并驱动三相电机。你只需要根据应用选择适合的模式。
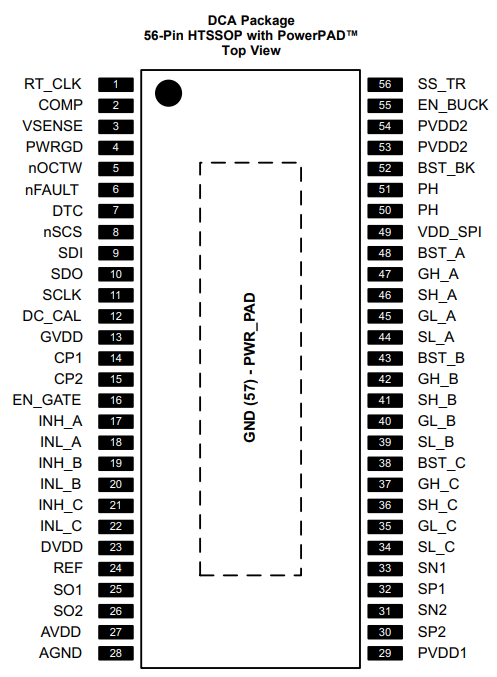
引脚说明
| 引脚名称 | 编号 | 类型 | 描述 |
|---|---|---|---|
| RT_CLK | 1 | 输入 | 用于降压稳压器的电阻定时和外部时钟。电阻应通过非常短的走线接到 GND,以减少由于噪声引起的潜在时钟抖动。 |
| COMP | 2 | 输出 | 降压误差放大器的输出,输入到输出开关电流比较器。 |
| VSENSE | 3 | 输入 | 降压输出电压检测引脚。误差放大器的反相节点。 |
| PWRGD | 4 | 输出 | 开漏输出,需要外部上拉电阻。当由于热关机、电压下降、过电压或 EN_BUCK 关闭导致降压输出电压低时,PWRGD 拉低。 |
| nOCTW | 5 | 输出 | 过流和/或过温警告指示器。此输出为开漏,需要外部上拉电阻。通过 SPI 寄存器可编程输出模式。 |
| nFAULT | 6 | 输出 | 故障报告指示器。此输出为开漏,需要外部上拉电阻。 |
| DTC | 7 | 输入 | 通过接地的外部电阻调整死区时间。 |
| nSCS | 8 | 输入 | SPI 芯片选择信号。 |
| SDI | 9 | 输入 | SPI 数据输入。 |
| SDO | 10 | 输出 | SPI 数据输出。 |
| SCLK | 11 | 输入 | SPI 时钟信号。 |
| DC_CAL | 12 | 输入 | 当 DC_CAL 拉高时,器件短接分流放大器的输入并断开负载。可通过外部微控制器执行直流偏置校准。 |
| GVDD | 13 | 电源 | 内部栅极驱动器电压调节器。GVDD 电容应连接到 GND。 |
| CP1 | 14 | 电源 | 电荷泵引脚 1,应在 CP1 和 CP2 之间使用陶瓷电容。 |
| CP2 | 15 | 电源 | 电荷泵引脚 2,应在 CP1 和 CP2 之间使用陶瓷电容。 |
| EN_GATE | 16 | 输入 | 启用栅极驱动器和分流电流放大器。通过 EN_BUCK 引脚控制降压功能。 |
| INH_A | 17 | 输入 | PWM 信号输入(高边),半桥 A。 |
| INL_A | 18 | 输入 | PWM 信号输入(低边),半桥 A。 |
| INH_B | 19 | 输入 | PWM 信号输入(高边),半桥 B。 |
| INL_B | 20 | 输入 | PWM 信号输入(低边),半桥 B。 |
| INH_C | 21 | 输入 | PWM 信号输入(高边),半桥 C。 |
| INL_C | 22 | 输入 | PWM 信号输入(低边),半桥 C。 |
| DVDD | 23 | 电源 | 内部 3.3V 电源电压。DVDD 电容应连接到 AGND。此引脚为输出,但不用于驱动外部电路。 |
| REF | 24 | 输入 | 设置分流放大器输出的参考电压。偏置电压等于此引脚上电压的一半。连接到微控制器的 ADC 参考电压。 |
| SO1 | 25 | 输出 | 电流放大器 1 的输出。 |
| SO2 | 26 | 输出 | 电流放大器 2 的输出。 |
| AVDD | 27 | 电源 | 内部 6V 电源电压。AVDD 电容应始终安装并连接到 AGND。此引脚为输出,但不用于驱动外部电路。 |
| AGND | 28 | 电源 | 模拟地引脚。直接连接到 GND(PowerPAD)。 |
| PVDD1 | 29 | 电源 | 栅极驱动器、电流分流放大器和 SPI 通信的电源引脚。PVDD1 独立于降压电源 PVDD2。PVDD1 电容应连接到 GND。 |
| SP2 | 30 | 输入 | 电流放大器 2 的正极输入。建议连接到分流电阻高边的接地端,以获得最佳的共模抑制效果。 |
| SN2 | 31 | 输入 | 电流放大器 2 的负极输入。 |
| SP1 | 32 | 输入 | 电流放大器 1 的正极输入。建议连接到分流电阻高边的接地端,以获得最佳的共模抑制效果。 |
| SN1 | 33 | 输入 | 电流放大器 1 的负极输入。 |
| SL_C | 34 | 输入 | 低边 MOSFET 源极连接,半桥 C。低边 VDS 电压测量在此引脚与 SH_C 之间。 |
| GL_C | 35 | 输出 | 低边 MOSFET 的栅极驱动输出,半桥 C。 |
| SH_C | 36 | 输入 | 高边 MOSFET 源极连接,半桥 C。高边 VDS 电压测量在此引脚与 PVDD1 之间。 |
| GH_C | 37 | 输出 | 高边 MOSFET 的栅极驱动输出,半桥 C。 |
| BST_C | 38 | 电源 | 半桥 C 的自举电容引脚。 |
| SL_B | 39 | 输入 | 低边 MOSFET 源极连接,半桥 B。低边 VDS 电压测量在此引脚与 SH_B 之间。 |
| GL_B | 40 | 输出 | 低边 MOSFET 的栅极驱动输出,半桥 B。 |
| SH_B | 41 | 输入 | 高边 MOSFET 源极连接,半桥 B。高边 VDS 电压测量在此引脚与 PVDD1 之间。 |
| GH_B | 42 | 输出 | 高边 MOSFET 的栅极驱动输出,半桥 B。 |
| BST_B | 43 | 电源 | 半桥 B 的自举电容引脚。 |
| SL_A | 44 | 输入 | 低边 MOSFET 源极连接,半桥 A。低边 VDS 电压测量在此引脚与 SH_A 之间。 |
| GL_A | 45 | 输出 | 低边 MOSFET 的栅极驱动输出,半桥 A。 |
| SH_A | 46 | 输入 | 高边 MOSFET 源极连接,半桥 A。高边 VDS 电压测量在此引脚与 PVDD1 之间。 |
| GH_A | 47 | 输出 | 高边 MOSFET 的栅极驱动输出,半桥 A。 |
| BST_A | 48 | 电源 | 半桥 A 的自举电容引脚。 |
| VDD_SPI | 49 | 输入 | 支持 3.3V 或 5V 逻辑的 SPI 电源引脚。连接到 MCU SPI 使用的相同电源。 |
| PH | 50, 51 | 输出 | 内部高边 MOSFET 的源极,用于降压转换器。 |
| BST_BK | 52 | 电源 | 降压转换器的自举电容引脚。 |
| PVDD2 | 53, 54 | 电源 | 降压转换器的电源引脚。PVDD2 电容应连接到 GND。 |
| EN_BUCK | 55 | 输入 | 启用降压转换器。内部上拉电流源。拉低至 1.2V 以下以禁用。悬空以启用。使用两个电阻调整输入欠压锁定。 |
| SS_TR | 56 | 输入 | 降压软启动和跟踪。连接到此引脚的外部电容设置输出上升时间。由于此引脚的电压覆盖内部参考电压,可用于跟踪和时序控制。电容应连接到 GND。 |
| GND | 57 | 电源 | GND 引脚。裸露的电源焊盘必须通过焊接连接到地平面以确保正常运行,并通过过孔连接到 PCB 的底面以改善散热。 |
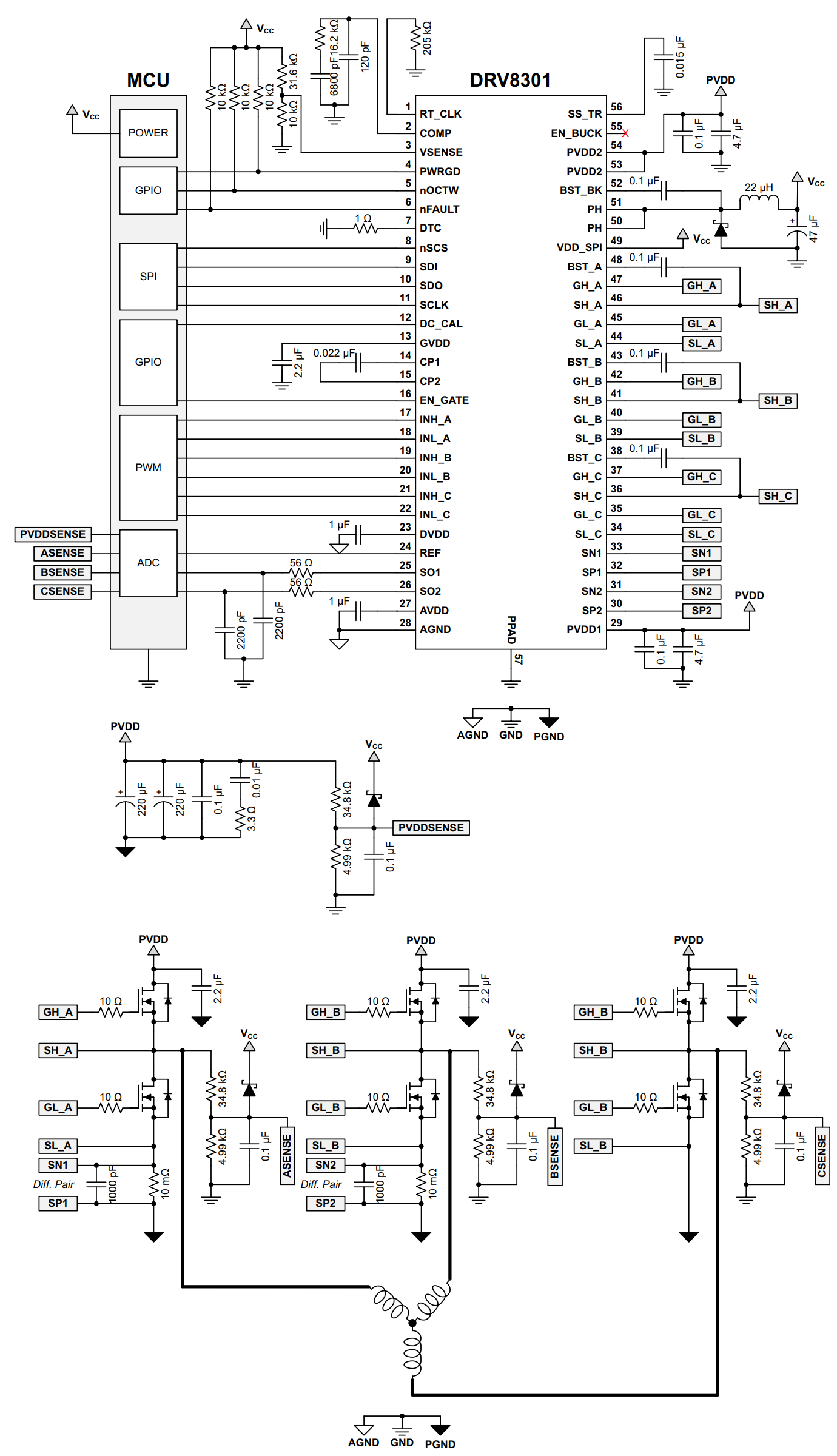
示例电路
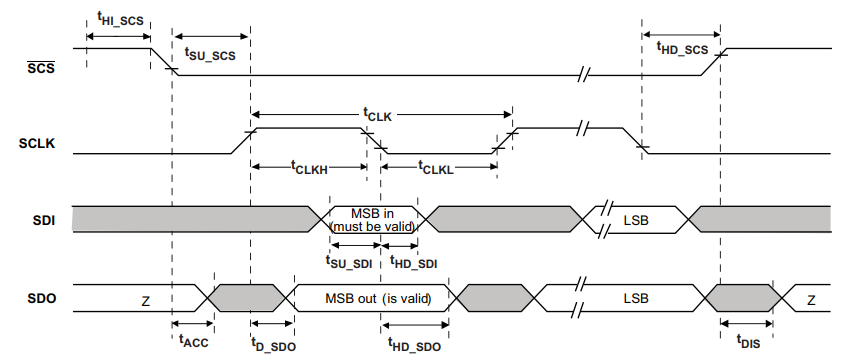
SPI 时序要求
| 参数 | 测试条件 | 最小值 (MIN) | 标称值 (NOM) | 最大值 (MAX) | 单位 |
|---|---|---|---|---|---|
| t_SPI_READY | EN_GATE 由低变高后 SPI 准备 | 5 | 10 | ms | |
| t_CLK | 最小 SPI 时钟周期 | 100 | ns | ||
| t_CLKH | 时钟高电平时间 | 40 | ns | ||
| t_CLKL | 时钟低电平时间 | 40 | ns | ||
| t_SU_SDI | SDI 输入数据建立时间 | 20 | ns | ||
| t_HD_SDI | SDI 输入数据保持时间 | 30 | ns | ||
| t_D_SDO | SDO 输出数据延迟时间 | 20 | ns | ||
| t_HD_SDO | SDO 输出数据保持时间 | 40 | ns | ||
| t_SU_SCS | SCS 建立时间 | 50 | ns | ||
| t_HD_SCS | SCS 保持时间 | 50 | ns | ||
| t_HI_SCS | SCS 最小高电平时间(SCS 激活为低电平) | 40 | ns | ||
| t_ACC | SCS 接入时间,从 SCS 低到 SDO 不再高阻态 | 10 | ns | ||
| t_DIS | SCS 禁用时间,从 SCS 高到 SDO 高阻态 | 10 | ns |
表格中使用了“EN_GATE”的上下沿信号说明。
时序要求均基于 SPI 从模式(Slave Mode),并在 PVDD > 6V 的条件下测试。
参数 t_D_SDO 的测试条件为 电容 CL = 20pF。
SPI 通信格式
DRV8301 SPI 以从属方式运行。SPI 输入(SDI)数据格式由一个 16 位字组成,其中包含:1 个读/写位、4 个地址位和 11 个数据位。SPI输出(SDO)数据格式由一个16位字组成,其中包含:1个帧错误位、4个地址位和11个数据位。当帧无效时,帧错误位将设置为1,剩余位将移出为 0.


由于从机的响应(SDO)是基于主机上一次发送的输入数据(SDI)进行的,因此完成一次查询/响应操作需要两次完整的 16 位数据传输。
这种机制是典型的 SPI 全双工数据传输中从设备延迟响应的特性。假设主机需要向从机发送一个指令并接收其响应:
- 第 1 次传输周期 (N-1)
- 主机通过 SDI 发送指令,比如 0x1234。
- 此时,从机尚未对 0x1234 进行处理,因此 SDO 输出的可能是无意义的默认值,比如 0x0000。
- 第 2 次传输周期 (N)
- 主机可以发送下一条指令,比如 0x5678。
- 从机通过 SDO 返回上一条指令(0x1234)的处理结果,比如 0x9ABC。
三相电路的正反转控制
三相电机通过改变电机三相绕组的电流方向(相序),从而调整产生的旋转磁场方向,最终实现正转或反转。
旋转磁场的形成
- 三相电机内部有三组绕组(A相、B相、C相),通以按一定时序切换的电流(例如正弦波、梯形波),会形成一个旋转磁场。
- 这个旋转磁场与电机转子的磁极相互作用,推动转子沿磁场方向旋转。
正反转的关键:改变相序
- 正转:三相电流按 A → B → C 的顺序通电,产生的旋转磁场顺时针(或逆时针)旋转。
- 反转:改变相序,例如改为 A → C → B 的顺序,旋转磁场的方向也随之反向,转子反向旋转。