MPU-60X0 由三个独立的 MEMS 振动陀螺仪组成,这些陀螺仪检测 X、Y 和 Z 轴的旋转。当陀螺仪绕任何感测轴旋转时,科里奥利效应会产生振动,并由电容式传感器进行检测。产生的信号经过放大、解调和滤波处理后,生成与角速率成正比的电压。该电压通过片上独立的 16 位模数转换器(ADC)进行数字化,以便对每个轴进行采样。陀螺仪的满量程范围可以数字编程选择为 ±250、±500、±1000 或 ±2000 度每秒(dps)。ADC 的采样率可编程,从每秒 8000 个采样降低至每秒 3.9 个采样,并且用户可以选择低通滤波器,以实现不同的截止频率。
引脚说明
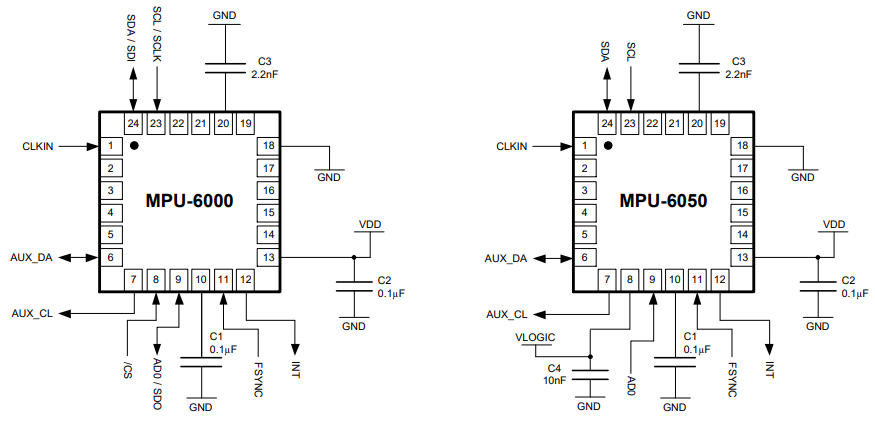
| 引脚编号 | MPU-6000 | MPU-6050 | 引脚名称 | 引脚描述 |
|---|---|---|---|---|
| 1 | Y | Y | CLKIN | 可选的外部参考时钟输入。如果不使用,连接到 GND。 |
| 6 | Y | Y | AUX_DA | I²C 主串行数据,用于连接外部传感器。 |
| 7 | Y | Y | AUX_CL | I²C 主串行时钟,用于连接外部传感器。 |
| 8 | Y | Y | /CS | SPI 片选(0 = SPI 模式)。 |
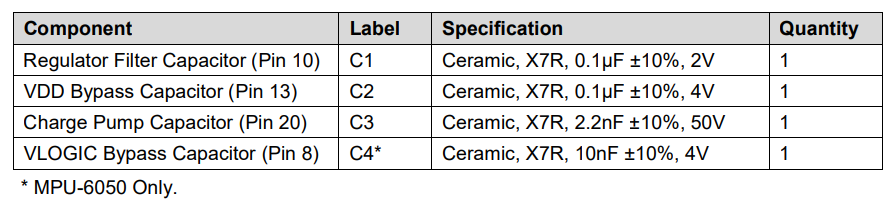
| 8 | Y | Y | VLOGIC | 数字 I/O 供电电压。 |
| 9 | Y | Y | AD0 / SDO | I²C 从设备地址最低有效位 (AD0) SPI 串行数据输出 (SDO) |
| 9 | Y | Y | AD0 | I²C 从设备地址最低有效位 (AD0)。 |
| 10 | Y | Y | REGOUT | 稳压滤波器电容器连接。 |
| 11 | Y | Y | FSYNC | 帧同步数字输入。未使用时连接到 GND。 |
| 12 | Y | Y | INT | 中断数字输出(推挽或开漏)。 |
| 13 | Y | Y | VDD | 电源供电电压和数字 I/O 供电电压。 |
| 18 | Y | Y | GND | 电源地。 |
| 19, 21 | Y | Y | RESV | 保留引脚。不要连接。 |
| 20 | Y | Y | CPOUT | 电荷泵电容器连接。 |
| 22 | Y | Y | RESV | 保留引脚。不要连接。 |
| 23 | Y | Y | SCL / SCLK | I²C 串行时钟(SCL);SPI 串行时钟信号(SCLK)。 |
| 23 | Y | Y | SCL | I²C 串行时钟(SCL)。 |
| 24 | Y | Y | SDA / SDI | I²C 串行数据线(SDA);SPI 串行数据输入线(SDI)。 |
| 24 | Y | Y | SDA | I²C 串行数据线(SDA)。 |
| 2, 3, 4, 5, 14, 15, 16, 17 | Y | Y | NC | 未内部连接,可用于 PCB 路由。 |
I2C 时序特性
| 参数 | 含义 | 最小值 | 典型值 | 最大值 | 单位 | 说明 |
|---|---|---|---|---|---|---|
| fSCL | SCL 时钟频率 | - | - | 400 | kHz | I²C Fast-Mode 最大时钟频率。 |
| tHD.STA | START 条件保持时间(重复 START 条件) | 0.6 | - | - | µs | START 条件后 SDA 需要保持的时间。 |
| tLOW | SCL 低电平时间 | 1.3 | - | - | µs | 时钟信号 SCL 的低电平周期时间。 |
| tHIGH | SCL 高电平时间 | 0.6 | - | - | µs | 时钟信号 SCL 的高电平周期时间。 |
| tSU.STA | START 条件建立时间 | 0.6 | - | - | µs | START 条件信号开始前 SDA 建立的时间。 |
| tHD;DAT | 数据保持时间 | 0 | - | - | µs | 数据传输后 SDA 保持的时间。 |
| tSU;DAT | 数据建立时间 | 100 | - | - | ns | 数据传输前 SDA 建立的最小时间。 |
| tR | SCL 和 SDA 的上升时间 | - | 20+0.1Cb | 300 | ns | 受电容 Cb 影响的上升时间。 |
| tF | SCL 和 SDA 的下降时间 | - | 20+0.1Cb | 300 | ns | 受电容 Cb 影响的下降时间。 |
| tSU;STO | STOP 条件建立时间 | 0.6 | - | - | µs | STOP 条件信号开始前的建立时间。 |
| tBUF | STOP 和下一次 START 之间的空闲时间 | 1.3 | - | - | µs | STOP 条件与下一次 START 之间的最小间隔。 |
| Cb | 每条总线的电容 | - | - | < 400 | pF | I²C 总线允许的最大电容负载。 |
| tVD;DAT | 数据有效时间(SDA 数据有效) | - | - | 0.9 | µs | 主机或从机输出数据后,接收方必须等待最多 0.9 µs 才能确认数据是有效的。 |
| tVD;ACK | ACK/NACK 信号有效时间(SDA 数据确认) | - | - | 0.9 | µs | 接收端发送 ACK/NACK 信号后,发送方最多需要等待 0.9 µs 才能确认这个应答信号是有效的。 |
基本条件
- VDD:工作电压范围在 2.375V - 3.46V。
- VLOGIC:对于 MPU-6050,这个逻辑电压为 1.8V±5% 或等于 VDD。
- TA = 25°C:所有数据的测量温度为 25°C。
I2C 地址
I2C 接口的从设备地址的最低有效位(LSB)由引脚 9(AD0)的电平决定,
如果 AD0 = 0(接地,逻辑低),LSB 为 0,从设备地址为 0x68(1101000)。
如果 AD0 = 1(接高电平,逻辑高),LSB 为 1,从设备地址为 0x69(1101001)。
通过配置 AD0 引脚,用户可以改变 MPU-60X0 的地址,从而允许两个 MPU-60X0 设备共存于同一条 I2C 总线上,而不会发生地址冲突。
角速度与加速度
角速度
角速度描述的是一个物体绕某个轴旋转的快慢,即物体在单位时间内旋转的角度。
它是旋转运动中的一个重要物理量。
加速度
加速度是描述物体速度变化快慢的物理量。
它表示单位时间内速度的变化量,可以描述直线运动中的加速、减速,或者方向变化引起的加速(如圆周运动)。
示例电路
示例代码
业务逻辑
屏幕翻转
翻转屏幕主要基于 加速度计的重力方向。当设备正常摆放时,重力加速度主要作用在 Z 轴方向;当设备翻转(如倒置或侧翻)时,重力方向会改变。
实现原理:
- 重力加速度分布:
- Z 轴朝上时:加速度计输出约 +1g。
- Z 轴朝下时:加速度计输出约 -1g。
- X 和 Y 轴也会随着设备翻转发生变化。
- 通过计算加速度计三轴(X、Y、Z)的方向与幅值,判断设备当前的朝向。
1 | void Check_Screen_Orientation(void) { |
说明:
- ax, ay, az 是加速度计的三轴数据。
- 值为 8000 表示加速度接近 1g(取决于量程配置,例如 ±8g 时 1g≈8192)。
睡眠
睡眠状态的判断通常基于 加速度计的变化程度。当设备长时间处于静止状态(加速度变化非常小),可以认为设备处于睡眠状态。
实现原理:
- 计算加速度计三轴数据的 均方根 或 变化幅度。
- 如果变化小于某个阈值,并持续一段时间,则进入睡眠状态。
1 |
|
说明:
- 静止时加速度幅值接近 1g,即 8192(取决于加速度量程)。
- 如果加速度变化幅度小于阈值 THRESHOLD_SLEEP 且持续时间大于 SLEEP_TIME,认为设备进入静止。
运动状态
运动状态的检测主要通过 加速度计或陀螺仪数据的变化。当设备处于运动中时,加速度或角速度的变化较大。
实现原理:
- 加速度突变:通过检测加速度值的变化,判断设备是否处于运动中。
- 陀螺仪角速度变化:检测旋转运动,增加判断的准确性。
1 |
|
说明:
- 加速度和角速度 的变化幅度都可用于判断运动状态。
- 如果任意轴的加速度或角速度超过设定阈值,则判定为运动。
摔倒检测
摔倒检测是一个较复杂的场景,通常结合 加速度的剧烈变化 和 角速度的瞬时变化。
实现原理:
- 自由落体检测:加速度突然接近
0g,表示设备正在快速下坠。 - 冲击检测:落地时加速度会瞬间增加,超过一定阈值。
- 结合角速度变化:摔倒时通常伴随较大的旋转运动。
1 |
|
说明:
- 自由落体:加速度接近 0。
- 冲击:落地时加速度远大于 1g。
- 摔倒往往伴随大幅度旋转,因此检测陀螺仪变化。