首先,对控制系统和控制理论的概念做简单的介绍。
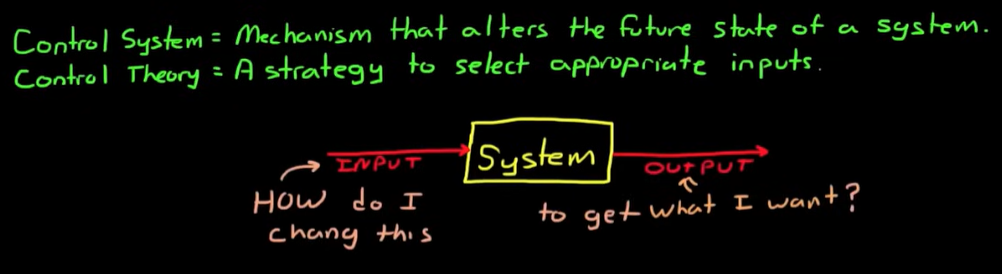
学术点讲,控制系统就是能改变系统未来状态的一种装置,它独立于控制对象本身,是我们人为设计出来给控制对象以控制信号的装置;而控制理论就是帮助我们合理设计这种装置的方法和策略。
大白话讲就是,有一个系统(system),给它一个输入(Input),它就会有一个输出(output),现在我们想它按我们想的来输出。此时,控制系统就是产生输入的东西,控制理论则告诉我们到底给什么输入。
开环控制
开环控制指输入不依赖于输出的控制方式;
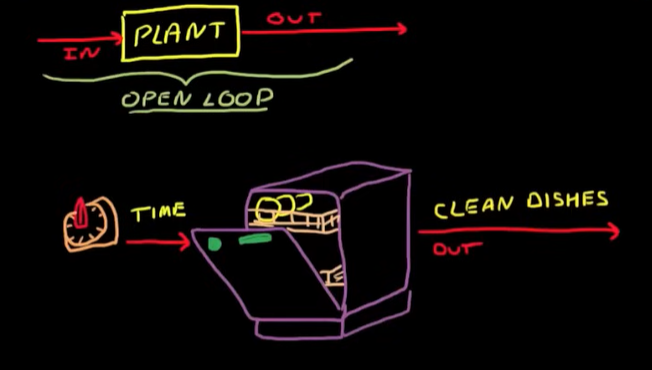
当我们只输入时间这个控制变量的时候,就是开环控制,因为控制量时间一经设置好就不变,不随着输出——盘子清洁程度的变化而变化;
对于一些精度不那么重要的系统来说开环控制非常友好
闭环控制
闭环控制指输出会反馈给输入端从而影响输入的控制方式;
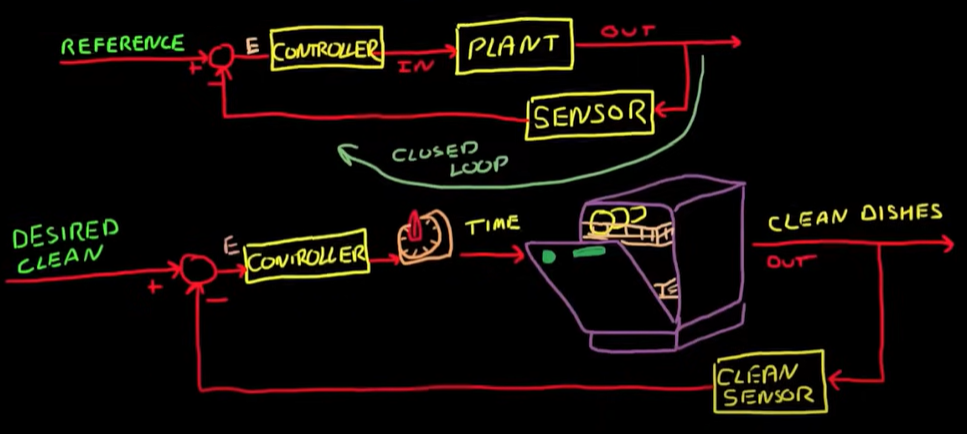
闭环控制过程中,会首先设置一个参考值,这里即盘子的清洁程度;探测结果的会反馈到控制器的输入端,与我们设置的参考值进行比较,得到误差 E;控制器根据E得到输入出结果,如果E > 0,说明盘子还没洗干净,需要增加清洁时间 t,直到E = 0,盘子被清洗干净。这一不断反馈并修正输入的过程构成了完整的闭环,即“闭环控制”;
PID 控制算法
PID(Proportional-Integral-Derivative)控制算法是一种高效且简单的闭环控制算法,用于解决目标值与实际值的差异(误差)问题。
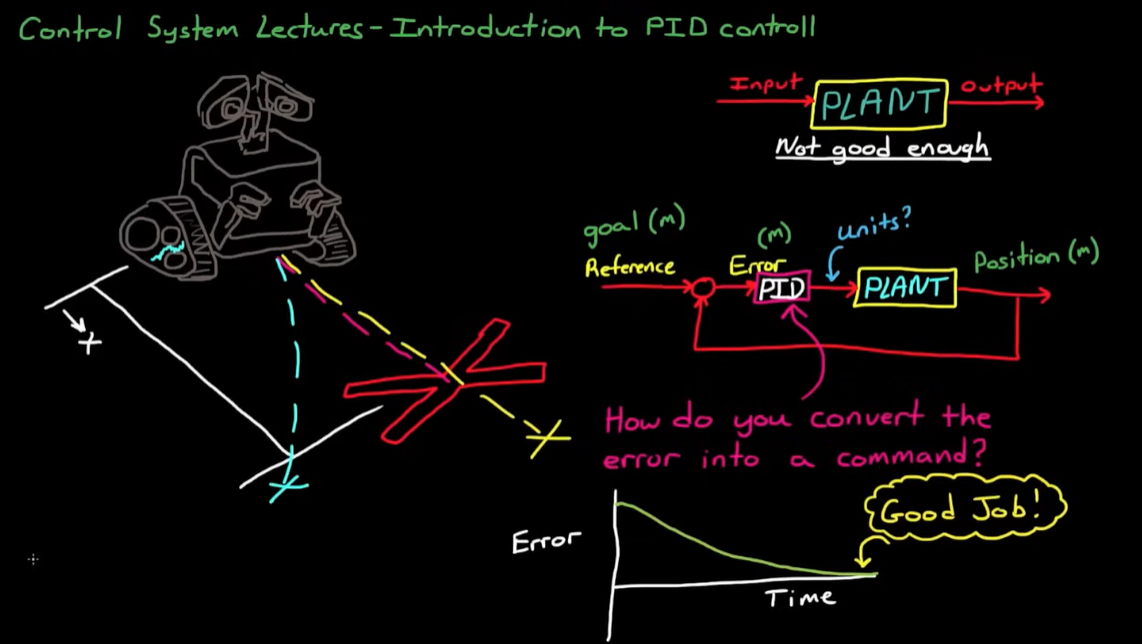
PID 代表:Proportional(比例),Integral(积分),Derivative(微分)。
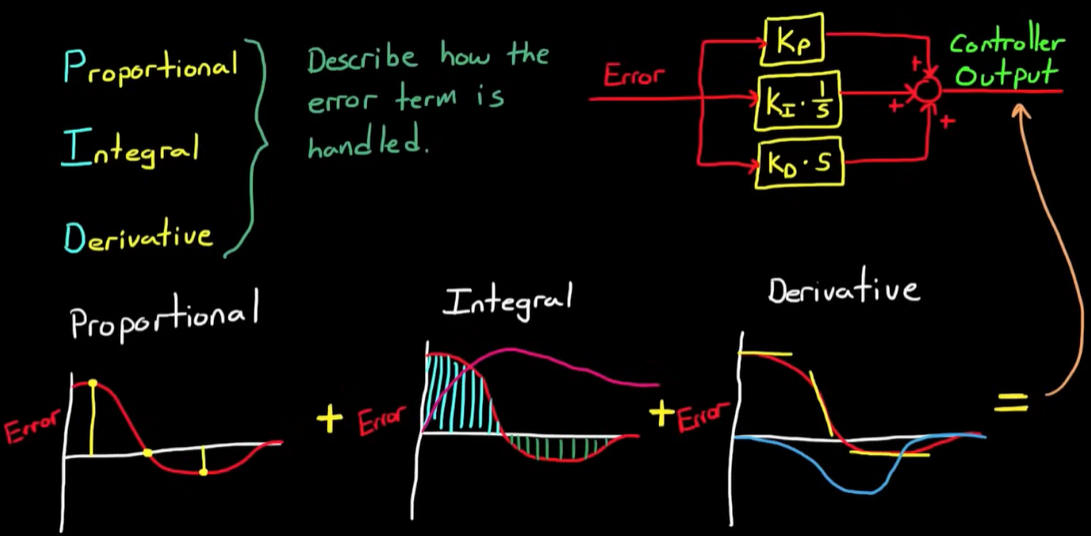
输入的 误差 (Error) 被送入三部分:比例通道、积分通道和微分通道。
三个通道各自根据误差,贡献不同的控制量(用增益系数(误差)分别乘以 Kp、KI、KD 来调整每个通道的影响),然后相加形成最终的控制输出。
Proportional(比例)
基于当前误差的大小来做出调整。误差越大,控制器输出的调整越大。
Integral(积分)
根据误差随时间的累积来做出调整。积分控制的作用是消除稳态误差(当比例控制无法完全消除误差时,积分控制会通过不断累积误差来进行调整)。
理想状态下,通过 P 和 D 可以让小车停留在目标位置,但是实际情况是 P 在被 D 抵消的同时,重力、摩擦力等因素也会对小车产生影响,导致其永远达不到目标位置;
稳态误差
稳态误差 是控制系统在经过足够长的时间后,系统输出与目标值(期望值)之间的持续偏差。换句话说,当系统稳定后(即进入稳态时),如果输出值无法完全达到目标值,则这种残留的误差被称为稳态误差。
Derivative(微分)
据误差变化的速率来做出调整。它主要用于预测误差的变化趋势,并对系统的动态响应进行调整,抵消由 P 产生的震荡。
比例控制处理“当前误差”;
积分控制处理“过去误差”;
微分控制处理“误差变化趋势”。
简单来说,就是将误差进行比例放大,微分阻尼,积分误差补偿
PID分别是如何实现的?
比例控制(P)
1 | // 计算出目标位置与当前位置的误差 |
- 比例控制的特点:它的优点是简单、快速,并且容易理解,但存在以下问题:
- 稳态误差:比例控制可能导致稳态误差(即即使控制系统在工作时,输出值也可能永远无法完全达到目标值)。这主要是因为比例控制始终是根据当前的误差做出调整,在误差减小时,控制输出也会减小,导致误差不能完全消除。
- 响应过快导致的震荡:比例控制可能会对某些系统造成过冲或震荡,尤其是在比例增益较大的情况下,系统过度调整,导致目标值的超调和再修正。
积分控制(I)
1 | // 积分 i = i += 误差 * dt, |
如果系统长时间存在误差(即系统偏离目标值),积分项会不断累积这些误差,并逐渐加大控制输出,直到误差完全消除,从而让系统达到目标值。
微分控制(D)
1 | // 微分 |
D 可以理解为速度,当速度过快时(error - previous_error < 0),D 算法就会抵消一部分 P 算法计算出来的的动力,从而减缓系统的震荡;
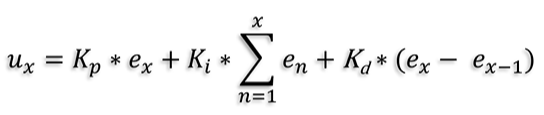
求和
1 | double output = Proportional + Ki * integral + Kd * derivative; |
实现如下
1 |
|
位置式PID 和 增量式PID
位置式PID
位置式 PID 计算的是控制量的绝对值,即每个时刻控制输出是基于当前的误差值、误差的积分和微分来直接计算的,控制输出是绝对的目标位置。
增量式PID
增量式 PID 计算的是控制量的增量,即当前时刻的控制输出是与前一个时刻控制输出的变化量(增量)相关,而不是直接计算出控制输出的绝对值。增量式 PID 关注的是如何调整控制量(而不是绝对的目标值),因此每一时刻的输出量是基于上一时刻的输出和当前误差来调整的。

二者区别
| 特性 | 位置式 PID | 增量式 PID |
|---|---|---|
| 输出形式 | 直接计算控制量的绝对值 u(t)u(t)u(t) | 计算控制量的增量 Δu(t)\Delta u(t)Δu(t) |
| 计算方式 | 当前位置的控制输出由误差、积分和微分直接计算 | 当前的控制输出由上一时刻的控制输出和误差的变化量计算 |
| 使用目的 | 适用于需要计算绝对控制输出的系统 | 适用于需要计算控制增量,控制量依赖于之前的输出的系统 |
| 控制量变化 | 控制量的变化直接由误差决定 | 控制量的变化由误差的增量和历史误差决定 |
| 优点 | 简单直观,适合许多标准控制应用,输出计算清晰 | 控制器对系统响应的调节较为平稳,尤其是对于一些已知参考模型的系统 |
| 缺点 | 容易受到数值积累的影响,可能导致积分饱和等问题 | 对于初始误差较大的系统,可能需要更多的调整和调试 |