PWM(Pulse Width Modulation,脉宽调制) 是嵌入式开发中一种非常常见的信号调制技术。它通过调节脉冲信号的宽度(占空比),来控制电流或电压的平均值,以达到对设备(如电机、LED、音频设备等)的精确控制。
PWM的基本概念:
- 脉冲信号:
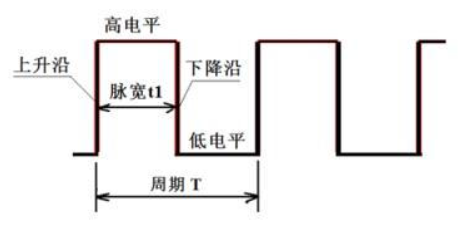
- PWM 信号是一个方波信号,它在一定时间周期内反复地在高电平(“开”)和低电平(“关”)之间切换。
- 周期(T):
- PWM信号的周期是指一个完整方波的时间长度。通常用频率(Hz)来表示,频率是周期的倒数,即 频率 = 1/周期。
- 例如,如果 PWM 信号的周期为 2 毫秒(ms),那么频率 = 1 / (2 * 10-3) = 500 Hz
- 频率是单位时间(一秒)内完成周期(一个高低电平)性变化的次数
- 占空比(Duty Cycle):
- 占空比是指信号在一个周期内处于高电平的时间长度与总周期长度的比例。占空比的范围从0%到100%。
- 占空比 = (高电平时间 / 总周期时间)× 100%
- 例如,占空比为50%的PWM信号意味着高电平和低电平各占一半时间;占空比为25%则表示信号只有四分之一的时间处于高电平。
STC8H
STC8H 系列的单片机内部集成了8 通道 16 位高级 PWM 定时器,分成两周期可不同的 PWM,分别命名为 PWMA 和PWMB ,可分别单独设置。
第一组 PWMA 可配置成 4 组互补 / 对称 / 死区控制 的PWM 或捕捉外部信号。
第二组 PWMB 可配置成 4 路PWM 输出或捕捉外部信号。
两组 PWM 的时钟频率可分别独立设置。
输出占空比
实现
串口实现 PWM 启停 0x01启动,0x00停止
拷贝所需库文件(其他必备库请自行准备)
1 |
|
配置
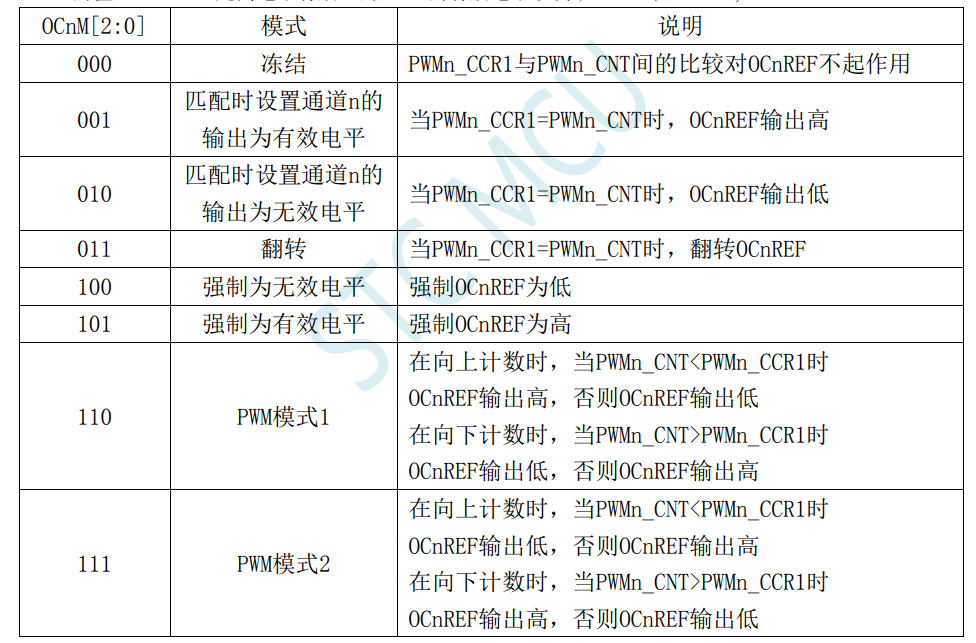
选择工作模式
常用的有 模式1、模式2
一般来说,PWM 模式 2 是“下降模式”,即在计数器从最大值向下计数时输出高电平,而从0计数向上时输出低电平,反之亦然。这种模式决定了PWM信号的工作方式和输出形态。
设置PWM的占空比
占空比:占空比是指信号为高电平的时间与一个周期内总时间的比值(也可以理解为在一个 PWM 周期内高电平所占的比值)。占空比为0意味着信号始终为低电平,而占空比为100%意味着信号始终为高电平。
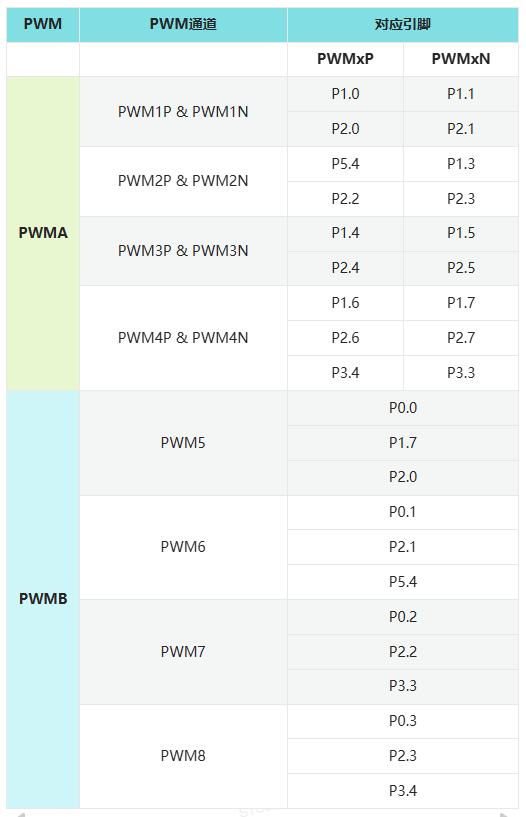
选择PWM输出的通道
正相/反相输出:正相(P)输出即正常的PWM波形,而反相(N)输出是正相波形的反相信号。在某些场合,如电机控制,需要同时输出正反相信号。
配置好后,直接通过物理引脚输出即可,为什么还要选择或者说设置一个”PWM输出的通道”?
不同的微控制器(MCU)通常内部有多个PWM生成模块。每个PWM模块内部可以生成多个不同的PWM信号,称为通道。
假设你使用一个MCU有一个定时器,可以生成4个PWM通道。如果你需要输出两个不同频率和占空比的 PWM 信号到两个引脚上,就可以配置通道 1 和通道 2,分别对应这两个 PWM 信号,并将它们分别映射到不同的物理引脚。
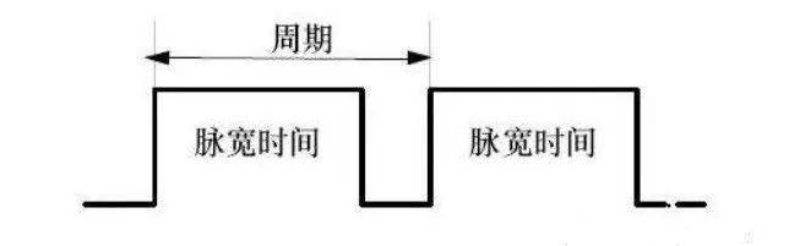
设置PWM的周期
PWM 周期指的是一个完整的 PWM 波形从开始到结束的时间长度,通常以时间单位(如毫秒或微秒)表示。在一个周期内,PWM 信号会从高电平变化到低电平,然后再回到高电平,形成一个完整的波形。
频率 = 1/周期:频率它描述了PWM信号中脉冲(或周期)出现的快慢。具体来说,频率是单位时间内脉冲重复出现的次数,通常用赫兹(Hz)作为单位来表示。例如,如果一个PWM信号的周期是1毫秒(ms),那么它的频率就是1毫秒的倒数,即1000次/秒,或者说1千赫兹(kHz)。
周期的长短决定了PWM信号的频率。周期越短,频率越高;周期越长,频率越低。具体的单位取决于定时器的配置和时钟频率。
STC8H 的时钟频率为 24 000 000,也就是 1 秒内有 24 000 000 个周期变化
我们这里将 PWM 周期设置为 1 ms 也就是 24 000 000 / 1000 = 24 000个周期变化
我们没法通过赋值 1,2这样来设置周期,只能通过上述的方式来进行计算;
设置死区时间
死区时间:在一些应用中,尤其是控制 H 桥电路或电机驱动时,正相和反相信号之间可能需要一个短暂的时间间隔,称为死区时间。这个间隔可以防止在两个 MOSFET 或者 IGBT 同时导通时造成短路。如果你不需要这种保护,就可以将死区时间设置为0。
启用PWM主输出
主输出:这是一个全局开关,控制所有已配置的PWM输出通道是否真正输出信号。如果设置为DISABLE,则即便其他配置已经完成,信号仍不会输出。
启用定时器计数
这通常是 PWM 定时器的使能控制位。当启用时,定时器开始计数并生成PWM波形。如果设置为DISABLE,定时器停止计数,PWM信号也停止输出。
PWM(脉宽调制) 一般需要配合计数器(定时器)一起使用。PWM信号的生成过程依赖于计数器的工作机制,定时器用于控制PWM信号的频率和占空比。定时器通过不断计数和重置,来实现PWM信号的周期性变化。
选择输出引脚
这一步将具体的 PWM 通道与物理引脚进行绑定。PWM4 的正相和反相信号将分别从使用的引脚输出。
输入捕获
实现
问题
一、为什么周期计算要 -1
假设我们希望 PWM 信号的周期时间是 100 个时钟周期。
定时器会从 0 开始计数,到达 99 后重置回 0。(从 0 数到 99 一共 99 次,然后在加一 就变成 0 了 也就是 数了 100 次)
从 0 计到 99,共计 100 次。
因此,我们设定的周期值应当是 100 - 1 = 99。
二、PWM 要用到计数器,那么为什么没有配置,或者说配置的内容在哪
三、特殊功能寄存器
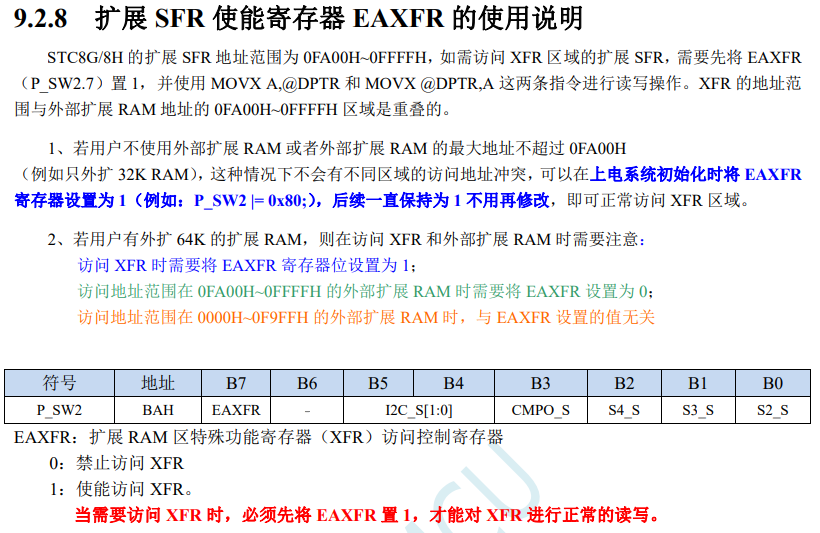
由于 PWM 的配置相关特殊功能寄存器位于扩展 RAM 区域,访问这些寄存器,需先将P_SW2 的 BIT7 设置为 1,才可正常读写。
1 | EAXSFR(); /* 扩展寄存器访问使能 */ |
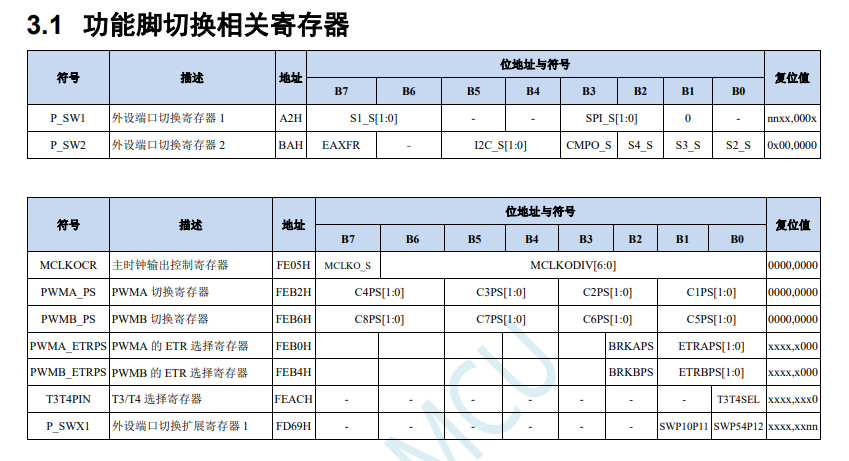
详细可参见STC8手册:
- 3.1.2 《外设端口切换控制寄存器 2(P_SW2)》
- 9.2.8 《扩展 SFR 使能寄存器 EAXFR 的使用说明》
四、没有指定为高电平(1)为什么马达也可以震动?
当你配置完占空比并指定引脚后,PWM 模块已经在你所指定的引脚上开始工作,产生脉冲信号。在 PWM 模式下,即便你没有手动拉高马达引脚,PWM 模块会自动根据配置产生高低电平信号。这种信号的变化(方波)会驱动马达振动。